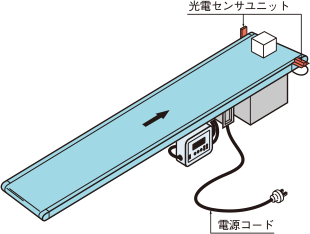
制御ユニット(S-BOXシリーズ) 機種
SR-1型 センサーユニット
-
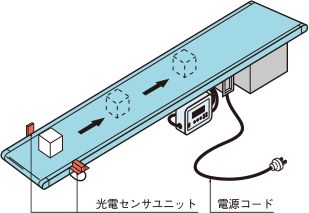
センサが搬送物を検知すれば停止し、取り除けば再起動します。
-
型式SR1
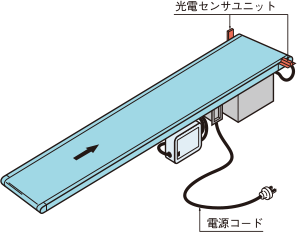
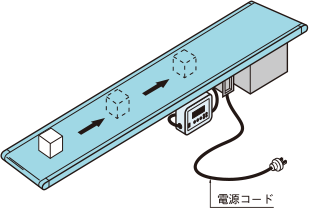
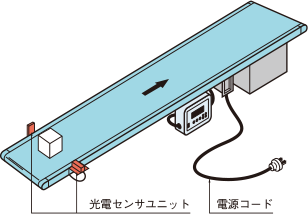
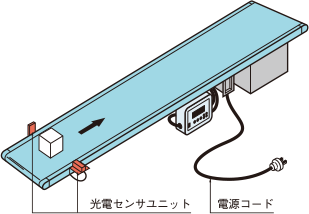
使用例
-
※標準センサはミラー反射板(検出距離0.1〜2m)です。搬送物によっては検知できない場合がありますのでお問い合わせください。
※速度が速すぎると、搬送物によってはオーバーランすることがあります。その場合、コントローラの停止精度を変更または電磁ブレーキの採用等を推奨します。
ST-1型 タイマユニット
-
センサが搬送物を検知すれば停止し、取り除けば再起動します。
-
型式ST1
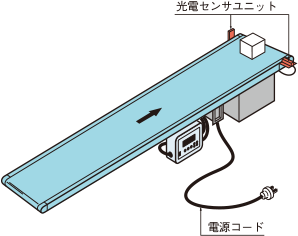
使用例
-
※標準センサはミラー反射板(検出距離0.1〜2m)です。搬送物によっては検知できない場合がありますのでお問い合わせください。
※タイマ設定範囲は0.1S〜99Hのマルチ設定です。
※速度が速すぎると、搬送物によってはオーバーランすることがあります。その場合、コントローラの停止精度を変更または電磁ブレーキの採用等を推奨します。
ST-2型 タイマユニット
-
センサが搬送物を検知すれば停止し、タイマ後に再起動します。また搬送物を取り除いても即、再起動します。

-
型式ST2
使用例
-
※標準センサはミラー反射板(検出距離0.1〜2m)です。搬送物によっては検知できない場合がありますのでお問い合わせください。
※タイマ設定範囲は0.1S〜99Hのマルチ設定です。
※速度が速すぎると、搬送物によってはオーバーランすることがあります。その場合、コントローラの停止精度を変更または電磁ブレーキの採用等を推奨します。
ST-3型 タイマユニット
-
センサが搬送物を検知すれば起動し、タイマ後に停止します

-
型式ST3
使用例
-
※標準センサはミラー反射板(検出距離0.1〜2m)です。搬送物によっては検知できない場合がありますのでお問い合わせください。
※タイマ設定範囲は0.1S〜99Hのマルチ設定です。
※速度が速すぎると、搬送物によってはオーバーランすることがあります。その場合、コントローラの停止精度を変更または電磁ブレーキの採用等を推奨します。
ST-4型 タイマユニット
-
ツインタイマによるオン・オフ繰り返し運転(タクト運転)を行います。

-
型式ST4
使用例
-
※タイマ設定範囲は0.1S〜99Hの間で時間レンジが選択可能です。
※開閉頻度が高い場合(1分間に10回以上)は使用できないことがあります。
※速度が速すぎると、搬送物によってはオーバーランすることがあります。その場合、コントローラの停止精度を変更または電磁ブレーキの採用等を推奨します。
SC-1型 カウンタユニット
-
搬送物がセンサを通過するたびに1カウントします。

-
型式SC1
使用例
-
※カウンタは8桁の加算動作、計測速度は30CPSです。
※標準センサはミラー反射板(検出距離0.1〜2m)です。搬送物によっては検知できない場合がありますのでお問い合わせください。
SC-2型 カウンタユニット
-
搬送物がセンサを通過するたびに1カウントし、設定数に達すると停止、リセットスイッチで再起動します。
-
型式SC2
使用例
-
※カウンタは8桁の加算動作、計測速度は30CPSです。
※標準センサはミラー反射板(検出距離0.1〜2m)です。搬送物によっては検知できない場合がありますのでお問い合わせください。
SC&B型 クラッチ&ブレーキユニット
-
ACモータのクラッチとブレーキのコンビネーションで、60回/minの起動停止が可能。

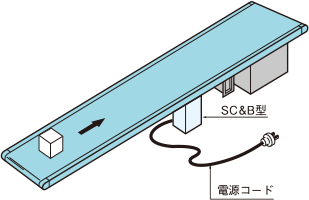
使用例
-
※DC24Vのクラッチ&ブレーキユニットに対応しています。
※IC無接点回路です。
※ブラシレスモータへの設定はありません。
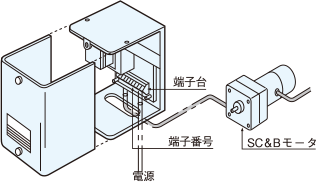
構造図
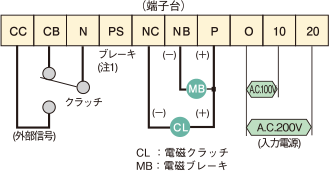
外部接続図
(注)1. PS端子は外部電源によるCL/MBの切替用です。2.外部信号には短絡時、数mAの電流しか流れないため、それに適した信号を使用してください。